










eラーニング特集:新人教育教材&設計ツール
-
[VOD/Full KIT/data]16ピンDIP FPGAスタータキット
元の価格 ¥22,000 - 元の価格 ¥22,000元の価格¥22,000¥22,000 - ¥22,000現在の価格 ¥22,000本製品の詳細>> ■ あらまし 本製品は,ブレッドボードでロジック回路開発を手軽に始めることができる16ピンDIP FPGAミニ・モジュールと専用書き込み器のセットです. ■ 付属品 (1)16ピンDIP FPGAミニモジュール(z-16dipfpga-1)(2)DIP FPG6A...
詳細を全部見る元の価格 ¥22,000 - 元の価格 ¥22,000元の価格¥22,000¥22,000 - ¥22,000現在の価格 ¥22,000 -
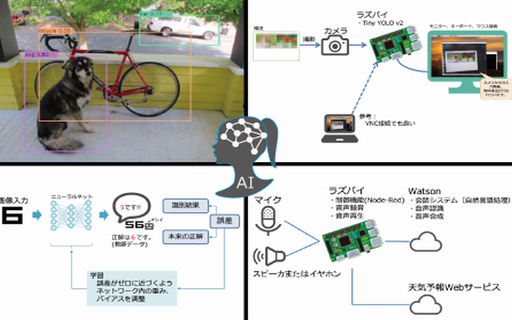
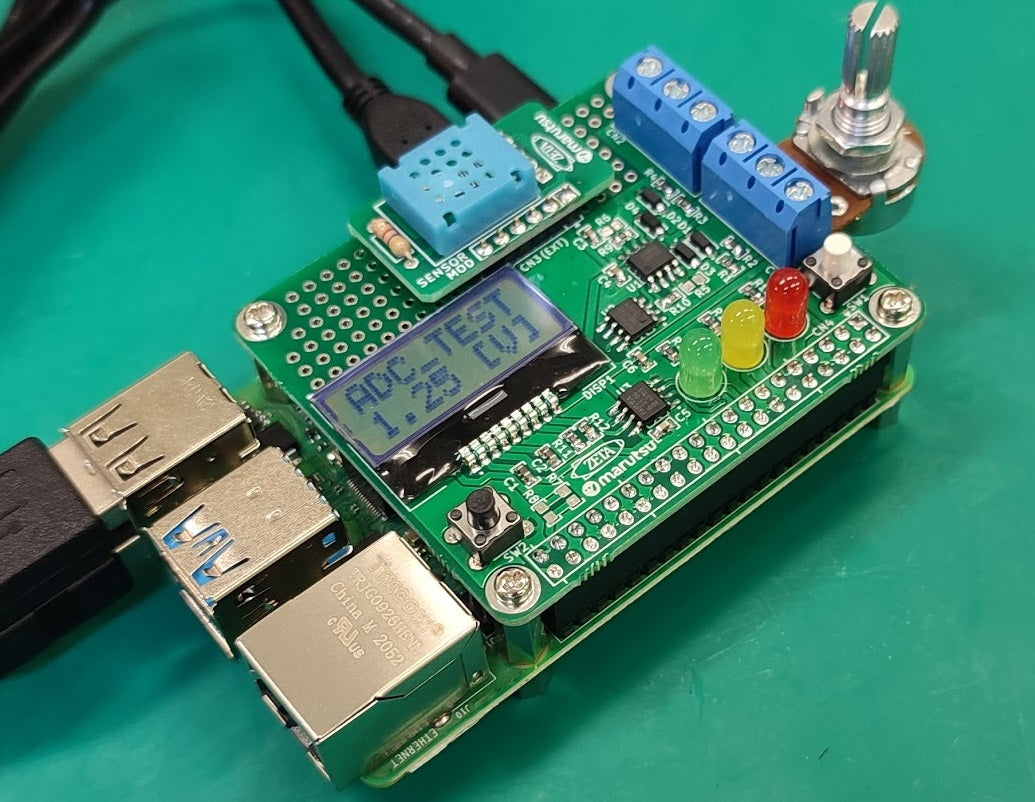
[VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門
元の価格 ¥39,600 - 元の価格 ¥39,600元の価格¥39,600¥39,600 - ¥39,600現在の価格 ¥39,600製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・ラズベリー・パイ4やマイク内蔵Webカメラをお持ちの場合は,[VOD] (キットなし) がおすすめです.・すべての映像,画像,文書テキスト,ソース...
詳細を全部見る元の価格 ¥39,600 - 元の価格 ¥39,600元の価格¥39,600¥39,600 - ¥39,600現在の価格 ¥39,600 -
[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門
元の価格 ¥45,100 - 元の価格 ¥45,100元の価格¥45,100¥45,100 - ¥45,100現在の価格 ¥45,100製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳格に守られています.無許可の転載,複製,転用は法律により罰せられます・ラズ...
詳細を全部見る元の価格 ¥45,100 - 元の価格 ¥45,100元の価格¥45,100¥45,100 - ¥45,100現在の価格 ¥45,100 -
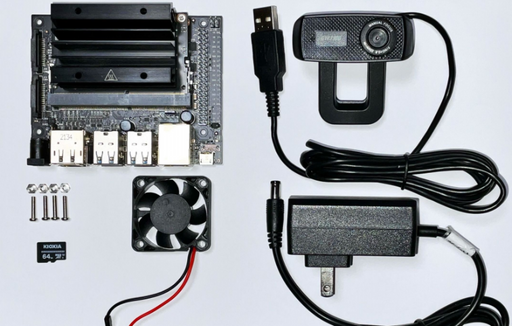
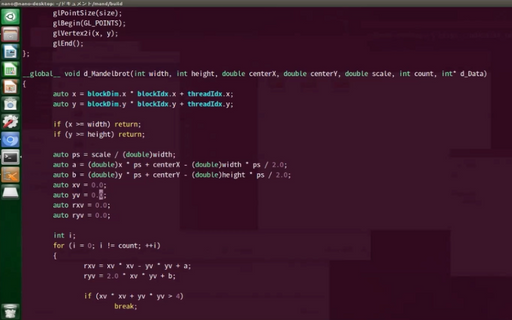
[VOD/KIT/data]Jeston Nanoキットで学ぶ NVIDIA CUDAプログラミング入門
元の価格 ¥66,000 - 元の価格 ¥66,000元の価格¥66,000¥66,000 - ¥66,000現在の価格 ¥66,000本製品の詳細>> 現在,在庫ぎれです.キット構成と内容を再検討中です. ※実習キットが不要な場合は,こちらがおすすめです. ご購入の前に ・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳格に守られてい...
詳細を全部見る元の価格 ¥66,000 - 元の価格 ¥66,000元の価格¥66,000¥66,000 - ¥66,000現在の価格 ¥66,000完売 -
[VOD/Pi4 KIT/Book]Pythonで一緒に!ロボット制御のモデルベース設計【実習編】
元の価格 ¥41,250 - 元の価格 ¥41,250元の価格¥41,250¥41,250 - ¥41,250現在の価格 ¥41,250本製品の詳細>> ご購入の前に ・本VOD教材の講義内容は,『[VOD/Pi2W KIT] ラズパイ×Pythonで動かして学ぶモータ制御入門』と同じですが,実習キット構成とソースコードをアップデートした製品です.・本教材には,Pythonによる制御工学をさらに詳しく学びたい方向け...
詳細を全部見る元の価格 ¥41,250 - 元の価格 ¥41,250元の価格¥41,250¥41,250 - ¥41,250現在の価格 ¥41,250 -

[VOD/KIT/data]M5Stamp Flyキットで学ぶドローン制御プログラミング入門
元の価格 ¥49,500 - 元の価格 ¥49,500元の価格¥49,500¥49,500 - ¥49,500現在の価格 ¥49,500本製品の詳細>> ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・実習キットを準備可能な方は,[VOD/data]実習キット非付属版がおすすめです.・LIVEセミナ「ドローン・キット“M5Stamp Fly”で学ぶ マルチコプタ制御入門」(2025年8月...
詳細を全部見る元の価格 ¥49,500 - 元の価格 ¥49,500元の価格¥49,500¥49,500 - ¥49,500現在の価格 ¥49,500 -
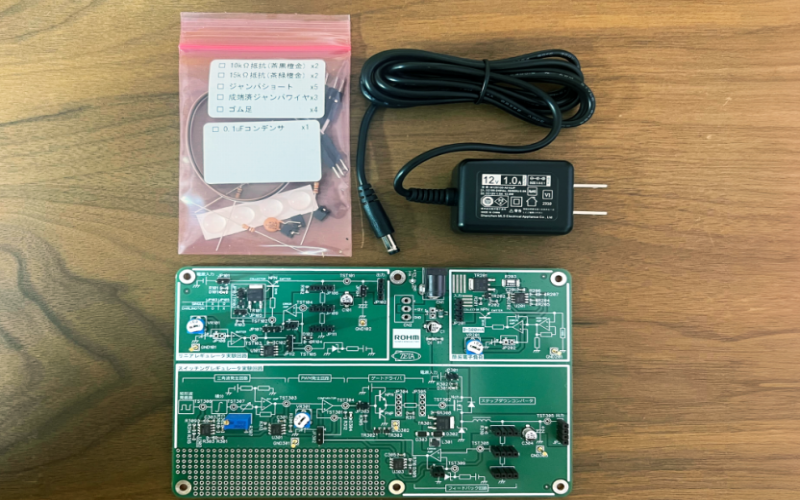
[VOD/KIT/data]実験キットで学ぶ 電源・アナログ回路入門
元の価格 ¥39,600 - 元の価格 ¥39,600元の価格¥39,600¥39,600 - ¥39,600現在の価格 ¥39,600本製品の詳細>> ※LIVEセミナ「実験キットで学ぶ 電源・アナログ回路入門」(2024年3月27日,4月 10日,4月24日開催)を受講された方は,特別価格でお求めいただけます.こちらからお申込みください. ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします...
詳細を全部見る元の価格 ¥39,600 - 元の価格 ¥39,600元の価格¥39,600¥39,600 - ¥39,600現在の価格 ¥39,600 -
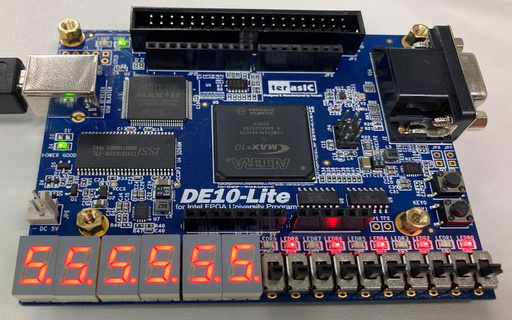
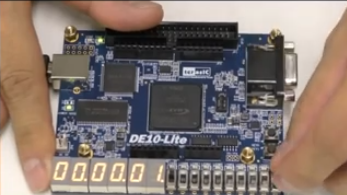
[VOD/KIT]一緒に動かそう!Lチカから始めるFPGA開発【基礎編&実践編】
元の価格 ¥69,300 - 元の価格 ¥69,300元の価格¥69,300¥69,300 - ¥69,300現在の価格 ¥69,300本製品の詳細>> ※DE10-Liteをお持ちの方は,こちらがおすすめです. ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳...
詳細を全部見る元の価格 ¥69,300 - 元の価格 ¥69,300元の価格¥69,300¥69,300 - ¥69,300現在の価格 ¥69,300 -
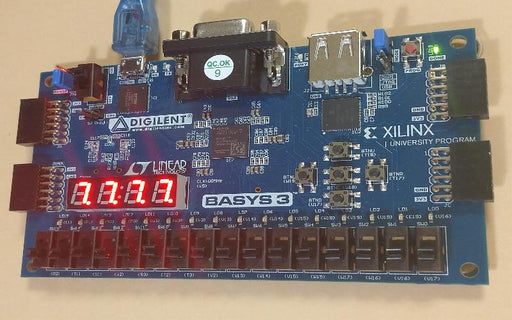
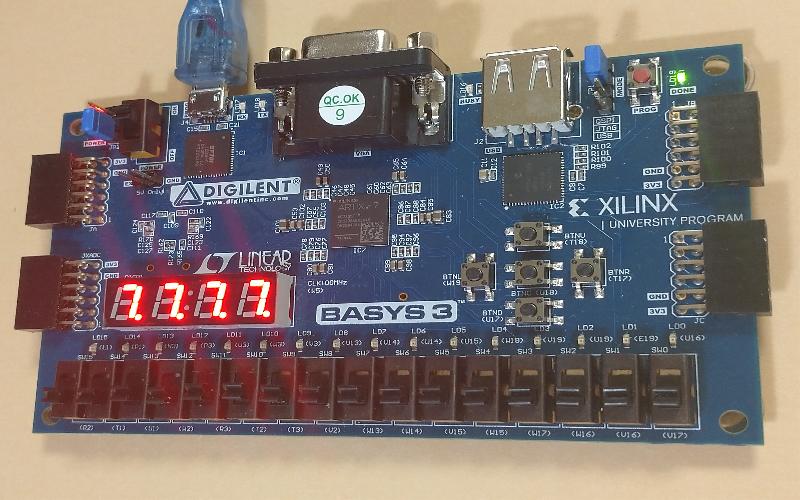
[VOD/KIT]Xilinx製FPGAで始めるHDL回路設計入門
元の価格 ¥52,800 - 元の価格 ¥52,800元の価格¥52,800¥52,800 - ¥52,800現在の価格 ¥52,800本製品の詳細>> ※Basys 3 Artix-7 FPGAボードをお持ちの方は,こちらがおすすめです. ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソース...
詳細を全部見る元の価格 ¥52,800 - 元の価格 ¥52,800元の価格¥52,800¥52,800 - ¥52,800現在の価格 ¥52,800 -
[VOD/data] 新人技術者のためのRISC-V CPU設計 初めの一歩
元の価格 ¥60,500 - 元の価格 ¥60,500元の価格¥60,500¥60,500 - ¥60,500現在の価格 ¥60,500本製品の詳細>> ※実習キットが必要な場合は,こちらがおすすめです. ●ご購入前に (1)講義資料,ソースコード類は1人1ライセンスです.(2)すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳格に守られています.無許可の転載,複製,転用は法律により罰せられます(...
詳細を全部見る元の価格 ¥60,500 - 元の価格 ¥60,500元の価格¥60,500¥60,500 - ¥60,500現在の価格 ¥60,500









eラーニング特集:モビリティ・自動運転・ロボティクス開発 実践技術



特集:高速・高信頼通信とセキュリティ技術教材



eラーニング特集:フィジカルAIで実現する 環境・農業センシング技術



新着!eラーニング・キット教材
-

[VOD/Full KIT/data]トランス製作実習!スイッチング電源回路設計&シミュレーション
元の価格 ¥64,900 - 元の価格 ¥64,900元の価格¥64,900¥64,900 - ¥64,900現在の価格 ¥64,900本製品の詳細>> ご購入の前に ・LCDカウンタ付き巻線機をお持ちの方は,『VOD/Semi KIT/data]版(USBプロトタイピング電源キット付属版)がおすすめです.・設計学習を中心に進めたい方は,[VOD/data]版(キットなし)がおすすめです.・VOD,解説テキスト,ソ...
詳細を全部見る元の価格 ¥64,900 - 元の価格 ¥64,900元の価格¥64,900¥64,900 - ¥64,900現在の価格 ¥64,900 -
[VOD/Full KIT/data]16ピンDIP FPGAスタータキット
元の価格 ¥22,000 - 元の価格 ¥22,000元の価格¥22,000¥22,000 - ¥22,000現在の価格 ¥22,000本製品の詳細>> ■ あらまし 本製品は,ブレッドボードでロジック回路開発を手軽に始めることができる16ピンDIP FPGAミニ・モジュールと専用書き込み器のセットです. ■ 付属品 (1)16ピンDIP FPGAミニモジュール(z-16dipfpga-1)(2)DIP FPG6A...
詳細を全部見る元の価格 ¥22,000 - 元の価格 ¥22,000元の価格¥22,000¥22,000 - ¥22,000現在の価格 ¥22,000 -
[VOD/data]LTspice実践100!電子回路&基板 設計トレーニングⅠ【半導体/部品編】
元の価格 ¥39,600 - 元の価格 ¥39,600元の価格¥39,600¥39,600 - ¥39,600現在の価格 ¥39,600本製品の詳細>> ・講師:青木 正 ご購入の前に ・本VOD,解説テキスト,ソースコード類は1人1ライセンスです 仕様 講義動画562分 解説229頁 実習用データ 目次 Part1 SPICEシミュレーション はじめの一歩 Part2 インダクタの基礎と実装上の落とし穴 P...
詳細を全部見る元の価格 ¥39,600 - 元の価格 ¥39,600元の価格¥39,600¥39,600 - ¥39,600現在の価格 ¥39,600 -

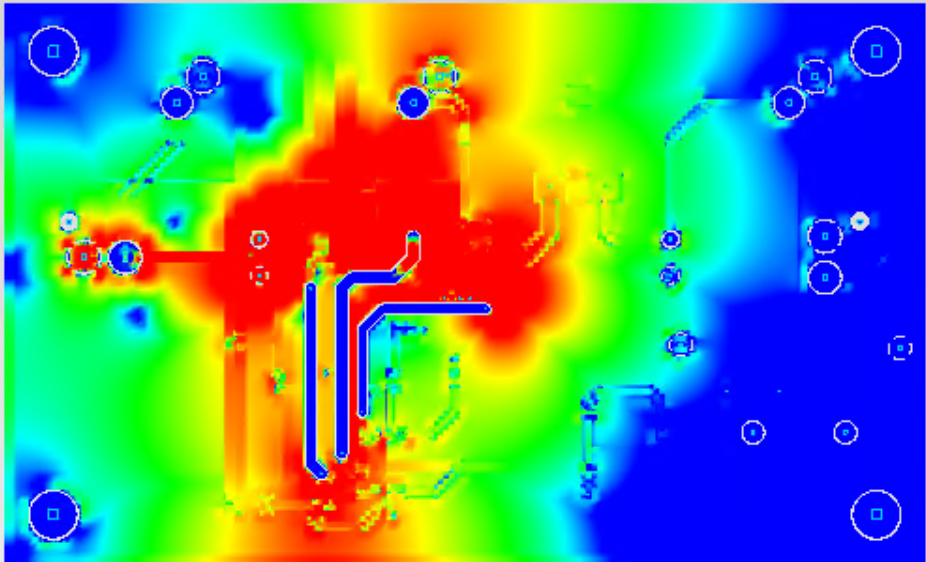
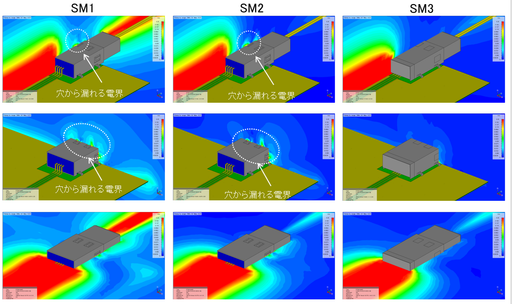
[VOD/data] EMCのための電磁界シミュレーション・トレーニングⅠ 【ノイズ対策部品編】
元の価格 ¥26,400 - 元の価格 ¥26,400元の価格¥26,400¥26,400 - ¥26,400現在の価格 ¥26,400本製品の詳細>> ・講師:川口 正 ご購入の前に ・本VOD,解説テキスト,ソースコード類は1人1ライセンスです 仕様 講義動画285分 解説174頁 実習用データ 目次 Part1_フィルタ部品やフェライトビーズ・コンデンサの使い方1.EMCとは2.主なEMC規格と回路設計者...
詳細を全部見る元の価格 ¥26,400 - 元の価格 ¥26,400元の価格¥26,400¥26,400 - ¥26,400現在の価格 ¥26,400 -

[Tool]熱設計スピード・ナビゲータ Thermocalc
元の価格 ¥63,250 - 元の価格 ¥63,250元の価格¥63,250¥63,250 - ¥63,250現在の価格 ¥63,250本製品の詳細>> ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・本製品はソフトウェアライセンス製品です(ご注文後にライセンスを発行いたします)・ライセンスはお客様のPCのMACアドレスに紐づいて発行されます ご注文後に配信されるメールをご確認のうえ、i...
詳細を全部見る元の価格 ¥63,250 - 元の価格 ¥63,250元の価格¥63,250¥63,250 - ¥63,250現在の価格 ¥63,250 -

[VOD]プリント基板と電子回路のEMC 実践ノウハウ100【第1版】
元の価格 ¥9,900 - 元の価格 ¥9,900元の価格¥9,900¥9,900 - ¥9,900現在の価格 ¥9,900本製品の詳細>> ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・コンテンツ内容について本VOD製品に収録されているコンテンツ(動画および講義テキスト)は,既刊書籍「デシベルから始めるプリント基...
詳細を全部見る元の価格 ¥9,900 - 元の価格 ¥9,900元の価格¥9,900¥9,900 - ¥9,900現在の価格 ¥9,900 -
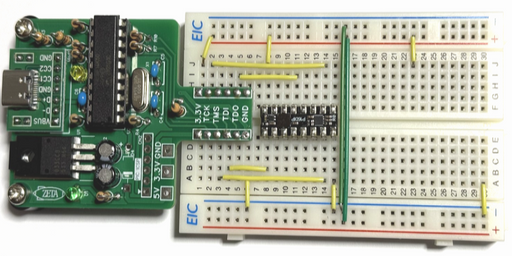
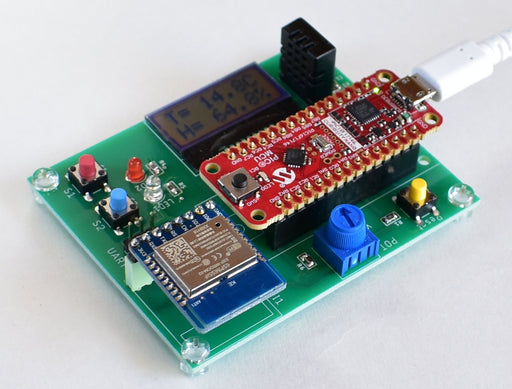
[VOD/KIT/data]脱シリアル変換IC!USBマイコン・プログラミング入門
元の価格 ¥29,150 - 元の価格 ¥29,150元の価格¥29,150¥29,150 - ¥29,150現在の価格 ¥29,150本製品の詳細>> ご購入の前に ・本製品には,実習キットが付属します.・LIVEセミナ「脱シリアル変換IC!USBマイコン・プログラミング入門」(2025年10月25日)を受講された方は,特別価格11,000円でお求めいただけます.以下からお申込みください.・[VOD/data]キ...
詳細を全部見る元の価格 ¥29,150 - 元の価格 ¥29,150元の価格¥29,150¥29,150 - ¥29,150現在の価格 ¥29,150 -
[VOD/Pi5 KIT/data]最適解を高速応答!Linuxで作る電子回路設計AI
元の価格 ¥75,900 - 元の価格 ¥75,900元の価格¥75,900¥75,900 - ¥75,900現在の価格 ¥75,900本製品の詳細>> ご購入の前に ・本コースには,Raspberry Pi 5 / 8GB,実習環境書き込み済SDカードなどを含むすべての部材が付属します.・Raspberry Pi 5(8GB以上)をお持ち,またはご準備可能な場合は,『[VOD/KIT/data]版(キット非付属版...
詳細を全部見る元の価格 ¥75,900 - 元の価格 ¥75,900元の価格¥75,900¥75,900 - ¥75,900現在の価格 ¥75,900 -
[VOD/KIT/data]M5Stamp Flyキットで学ぶドローン制御プログラミング入門
元の価格 ¥49,500 - 元の価格 ¥49,500元の価格¥49,500¥49,500 - ¥49,500現在の価格 ¥49,500本製品の詳細>> ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・実習キットを準備可能な方は,[VOD/data]実習キット非付属版がおすすめです.・LIVEセミナ「ドローン・キット“M5Stamp Fly”で学ぶ マルチコプタ制御入門」(2025年8月...
詳細を全部見る元の価格 ¥49,500 - 元の価格 ¥49,500元の価格¥49,500¥49,500 - ¥49,500現在の価格 ¥49,500 -

[VOD/Full KIT/data]ラズパイとPythonで一緒に! カルマン・フィルタ&センサ・フュージョン入門
元の価格 ¥37,400 - 元の価格 ¥37,400元の価格¥37,400¥37,400 - ¥37,400現在の価格 ¥37,400本製品の詳細>> ご購入の前に ・本製品には,Raspberry Pi 4 Model B 2GB,6軸IMUモジュール,ロータリーエンコーダなどを含むすべての部材が付属します.・Raspberry Pi4をお持ちの方は,[VOD/Semi KIT/data]Raspberry P...
詳細を全部見る元の価格 ¥37,400 - 元の価格 ¥37,400元の価格¥37,400¥37,400 - ¥37,400現在の価格 ¥37,400








入門者におすすめ
-
[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門
元の価格 ¥45,100 - 元の価格 ¥45,100元の価格¥45,100¥45,100 - ¥45,100現在の価格 ¥45,100製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳格に守られています.無許可の転載,複製,転用は法律により罰せられます・ラズ...
詳細を全部見る元の価格 ¥45,100 - 元の価格 ¥45,100元の価格¥45,100¥45,100 - ¥45,100現在の価格 ¥45,100 -
[VOD/KIT]STM32マイコン&Wi-Fiモジュールで学ぶ C/C++プログラミング入門
元の価格 ¥29,700 - 元の価格 ¥29,700元の価格¥29,700¥29,700 - ¥29,700現在の価格 ¥29,700本製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳格に守られています.無許可の転載,複製,転用は法律により罰せられます・そ...
詳細を全部見る元の価格 ¥29,700 - 元の価格 ¥29,700元の価格¥29,700¥29,700 - ¥29,700現在の価格 ¥29,700 -

[VOD/KIT/Book]PICマイコン オールイン1日学習キット
元の価格 ¥38,500 - 元の価格 ¥38,500元の価格¥38,500¥38,500 - ¥38,500現在の価格 ¥38,500本製品の詳細>> ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・本製品では,講義テキストとして「改訂新版 8ピンPICマイコンの使い方がよくわかる本(技術評論社)」も使用します.本書籍をお持ちの方は,[VOD/KIT](著書なし)がおすすめです.・解説...
詳細を全部見る元の価格 ¥38,500 - 元の価格 ¥38,500元の価格¥38,500¥38,500 - ¥38,500現在の価格 ¥38,500 -
[VOD/KIT]一緒に動かそう!Lチカから始めるFPGA開発【基礎編&実践編】
元の価格 ¥69,300 - 元の価格 ¥69,300元の価格¥69,300¥69,300 - ¥69,300現在の価格 ¥69,300本製品の詳細>> ※DE10-Liteをお持ちの方は,こちらがおすすめです. ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳...
詳細を全部見る元の価格 ¥69,300 - 元の価格 ¥69,300元の価格¥69,300¥69,300 - ¥69,300現在の価格 ¥69,300 -
[VOD/KIT/data]8bit PIC/Wi-Fi/Debugger搭載!ミニマムIoTデバイス製作キット
元の価格 ¥19,800 - 元の価格 ¥19,800元の価格¥19,800¥19,800 - ¥19,800現在の価格 ¥19,800本製品の詳細>> ご購入の前に ・本製品は,2025年1月26日に開催されたウェビナ「120分で学ぶ!最新PICマイコン・キット 超スピードIoT開発」を編集したVODです.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコード...
詳細を全部見る元の価格 ¥19,800 - 元の価格 ¥19,800元の価格¥19,800¥19,800 - ¥19,800現在の価格 ¥19,800 -
[VOD/KIT/data]脱シリアル変換IC!USBマイコン・プログラミング入門
元の価格 ¥29,150 - 元の価格 ¥29,150元の価格¥29,150¥29,150 - ¥29,150現在の価格 ¥29,150本製品の詳細>> ご購入の前に ・本製品には,実習キットが付属します.・LIVEセミナ「脱シリアル変換IC!USBマイコン・プログラミング入門」(2025年10月25日)を受講された方は,特別価格11,000円でお求めいただけます.以下からお申込みください.・[VOD/data]キ...
詳細を全部見る元の価格 ¥29,150 - 元の価格 ¥29,150元の価格¥29,150¥29,150 - ¥29,150現在の価格 ¥29,150 -

[VOD/KIT/data]実験キットで学ぶ 初歩の電子回路設計
元の価格 ¥39,600 - 元の価格 ¥39,600元の価格¥39,600¥39,600 - ¥39,600現在の価格 ¥39,600本製品の詳細>> ※LIVEセミナ「実験キットで学ぶ 電源・アナログ回路入門」(2025年6月25日,7月23日開催)を受講された方は,特別価格でお求めいただけます.以下からお申込みください. ・[VOD/KIT/data]実習キットで学ぶ 初歩の電子回路設計【リピート学習割引】(...
詳細を全部見る元の価格 ¥39,600 - 元の価格 ¥39,600元の価格¥39,600¥39,600 - ¥39,600現在の価格 ¥39,600 -
[VOD/Full KIT/data]トランス製作実習!スイッチング電源回路設計&シミュレーション
元の価格 ¥64,900 - 元の価格 ¥64,900元の価格¥64,900¥64,900 - ¥64,900現在の価格 ¥64,900本製品の詳細>> ご購入の前に ・LCDカウンタ付き巻線機をお持ちの方は,『VOD/Semi KIT/data]版(USBプロトタイピング電源キット付属版)がおすすめです.・設計学習を中心に進めたい方は,[VOD/data]版(キットなし)がおすすめです.・VOD,解説テキスト,ソ...
詳細を全部見る元の価格 ¥64,900 - 元の価格 ¥64,900元の価格¥64,900¥64,900 - ¥64,900現在の価格 ¥64,900 -

[VOD/Full KIT/data]USBマルチ測定器付き!実測とシミュレーションで学ぶアナログ回路設計
元の価格 ¥49,500 - 元の価格 ¥49,500元の価格¥49,500¥49,500 - ¥49,500現在の価格 ¥49,500本製品の詳細 ●あらまし 現場で実際に利用されているOPアンプ“AD8506”を実装した実習キット“z-adalmopa”を動かしながらOPアンプの実践的かつ重要なポイントを理解します.回路の性能やふるまいは,USBマルチ測定器 ADALM1000を使って観測・測定します.ALICEという測定...
詳細を全部見る元の価格 ¥49,500 - 元の価格 ¥49,500元の価格¥49,500¥49,500 - ¥49,500現在の価格 ¥49,500 -
[VOD/KIT/data]実験キットで学ぶ 電源・アナログ回路入門
元の価格 ¥39,600 - 元の価格 ¥39,600元の価格¥39,600¥39,600 - ¥39,600現在の価格 ¥39,600本製品の詳細>> ※LIVEセミナ「実験キットで学ぶ 電源・アナログ回路入門」(2024年3月27日,4月 10日,4月24日開催)を受講された方は,特別価格でお求めいただけます.こちらからお申込みください. ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします...
詳細を全部見る元の価格 ¥39,600 - 元の価格 ¥39,600元の価格¥39,600¥39,600 - ¥39,600現在の価格 ¥39,600





売れてます!人気ランキング
-

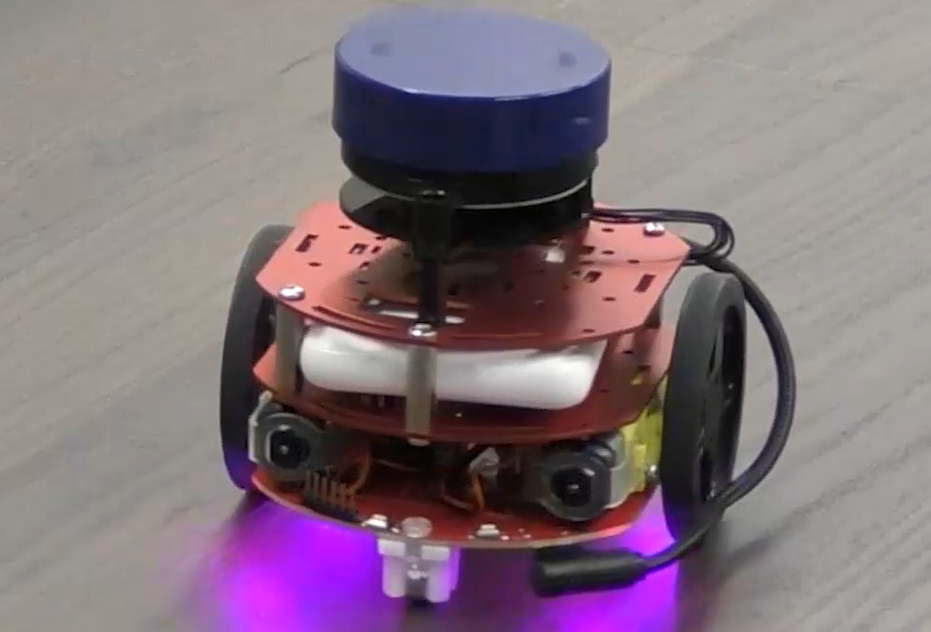
[VOD/Full KIT/data]3D LiDAR×Jetson Superキットで学ぶ高精度リアルタイムSLAM&センサ・フュージョン
元の価格 ¥225,500 - 元の価格 ¥225,500元の価格¥225,500¥225,500 - ¥225,500現在の価格 ¥225,500本製品の詳細>> ※LIVEセミナ「3D LiDAR×Jetson Superキットで学ぶ高精度リアルタイムSLAM&センサ・フュージョン」(2025年5月17日開催)を受講された方は,特別価格でお求めいただけます.こちらからお申込みください. ●ご購入前に (1)会社・教育機...
詳細を全部見る元の価格 ¥225,500 - 元の価格 ¥225,500元の価格¥225,500¥225,500 - ¥225,500現在の価格 ¥225,500 -
[VOD/KIT/data]M5Stamp Flyキットで学ぶドローン制御プログラミング入門
元の価格 ¥49,500 - 元の価格 ¥49,500元の価格¥49,500¥49,500 - ¥49,500現在の価格 ¥49,500本製品の詳細>> ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・実習キットを準備可能な方は,[VOD/data]実習キット非付属版がおすすめです.・LIVEセミナ「ドローン・キット“M5Stamp Fly”で学ぶ マルチコプタ制御入門」(2025年8月...
詳細を全部見る元の価格 ¥49,500 - 元の価格 ¥49,500元の価格¥49,500¥49,500 - ¥49,500現在の価格 ¥49,500 -
[VOD/KIT]一緒に動かそう!Lチカから始めるFPGA開発【基礎編&実践編】
元の価格 ¥69,300 - 元の価格 ¥69,300元の価格¥69,300¥69,300 - ¥69,300現在の価格 ¥69,300本製品の詳細>> ※DE10-Liteをお持ちの方は,こちらがおすすめです. ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳...
詳細を全部見る元の価格 ¥69,300 - 元の価格 ¥69,300元の価格¥69,300¥69,300 - ¥69,300現在の価格 ¥69,300 -
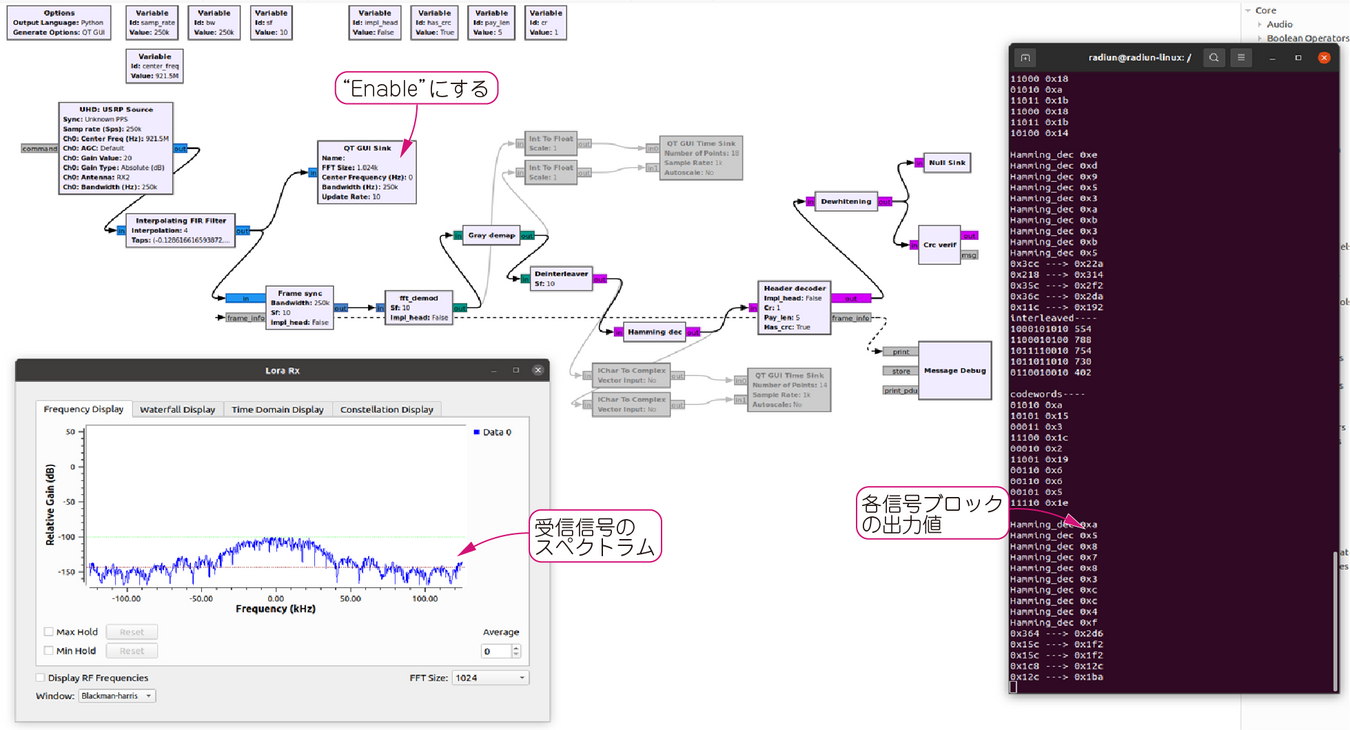
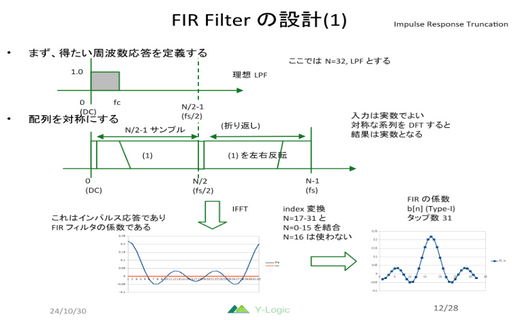
[VOD/KIT]初めてのソフトウェア無線&信号処理プログラミング 基礎編/応用編
元の価格 ¥39,600 - 元の価格 ¥39,600元の価格¥39,600¥39,600 - ¥39,600現在の価格 ¥39,600製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳格に守られています.無許可の転載,複製,転用は法律により罰せられます・その他の...
詳細を全部見る元の価格 ¥39,600 - 元の価格 ¥39,600元の価格¥39,600¥39,600 - ¥39,600現在の価格 ¥39,600 -
[VOD/KIT/data]Arm M4/M7/DSP×500MHz!STM32H7ハイスペック計測通信Module開発
元の価格 ¥88,000 - 元の価格 ¥88,000元の価格¥88,000¥88,000 - ¥88,000現在の価格 ¥88,000本製品の詳細>> ※実習キットが不要な場合は,こちらがおすすめです. ●ご購入前に (1)講義資料,ソースコード類は1人1ライセンスです.(2)すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳格に守られています.無許可の転載,複製,転用は法律により罰せられます(...
詳細を全部見る元の価格 ¥88,000 - 元の価格 ¥88,000元の価格¥88,000¥88,000 - ¥88,000現在の価格 ¥88,000完売 -
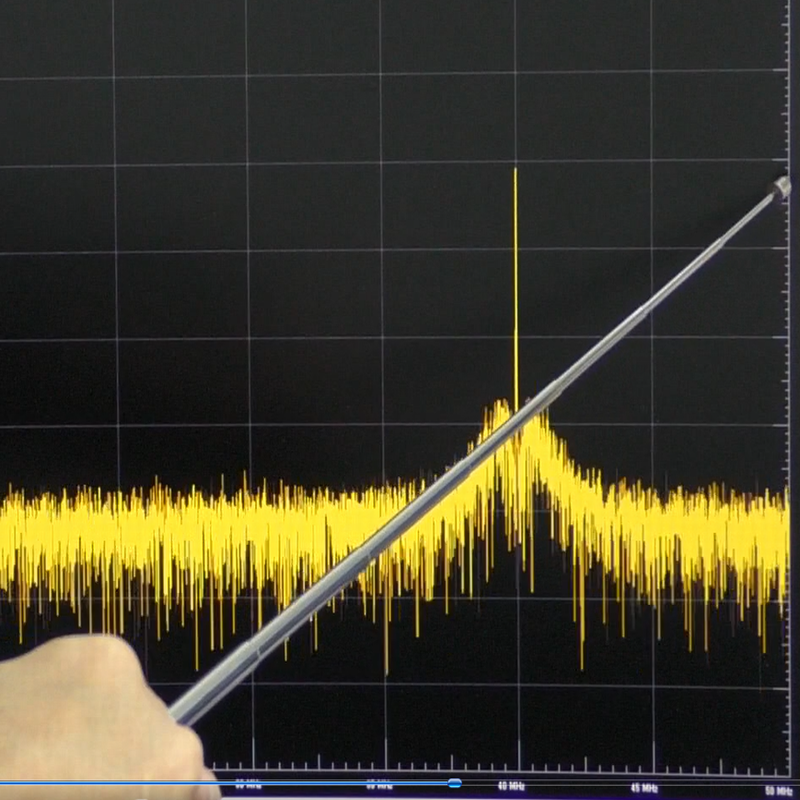
[VOD/KIT]ポケット・スペアナで手軽に!基板と回路のEMCノイズ対策 10の定石
元の価格 ¥41,800 - 元の価格 ¥41,800元の価格¥41,800¥41,800 - ¥41,800現在の価格 ¥41,800本製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳格に守られています.無許可の転載,複製,転用は法律により罰せられます・...
詳細を全部見る元の価格 ¥41,800 - 元の価格 ¥41,800元の価格¥41,800¥41,800 - ¥41,800現在の価格 ¥41,800 -
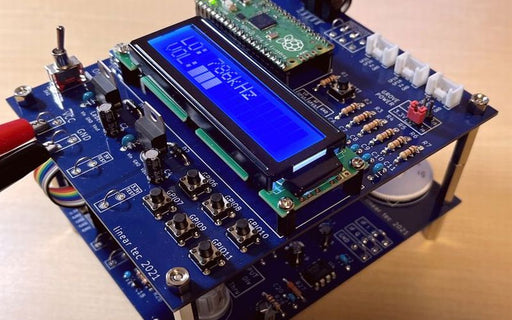
[VOD/KIT]実習キットで一緒に作る!オープンソースCPU RISC-V入門
元の価格 ¥127,600 - 元の価格 ¥127,600元の価格¥127,600¥127,600 - ¥127,600現在の価格 ¥127,600本製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳格に守られています.無許可の転載,複製,転用は法律により罰せられます・その...
詳細を全部見る元の価格 ¥127,600 - 元の価格 ¥127,600元の価格¥127,600¥127,600 - ¥127,600現在の価格 ¥127,600 -

[VOD/KIT]RTKポータブル・センチメートル測位キット
元の価格 ¥105,600 - 元の価格 ¥105,600元の価格¥105,600¥105,600 - ¥105,600現在の価格 ¥105,600本製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳格に守られています.無許可の転載,複製,転用は法律により罰せられ...
詳細を全部見る元の価格 ¥105,600 - 元の価格 ¥105,600元の価格¥105,600¥105,600 - ¥105,600現在の価格 ¥105,600 -
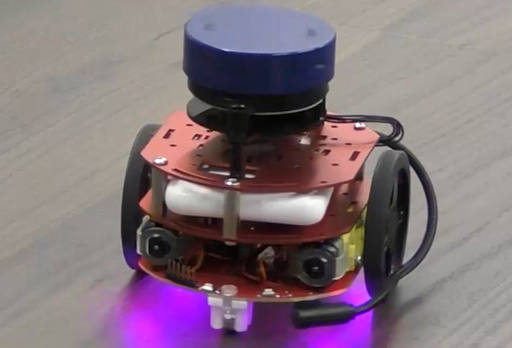
[VOD/Pi4 KIT] SLAMロボット&ラズパイ付き!ROSプログラミング超入門
元の価格 ¥79,200 - 元の価格 ¥79,200元の価格¥79,200¥79,200 - ¥79,200現在の価格 ¥79,200本製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・Raspberry Pi4以上を準備可能な方は,[VOD/KIT] (ラズパイ4非付属版)がおすすめです. ・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキ...
詳細を全部見る元の価格 ¥79,200 - 元の価格 ¥79,200元の価格¥79,200¥79,200 - ¥79,200現在の価格 ¥79,200 -
[VOD/KIT/data]実験キットで学ぶ 電源・アナログ回路入門
元の価格 ¥39,600 - 元の価格 ¥39,600元の価格¥39,600¥39,600 - ¥39,600現在の価格 ¥39,600本製品の詳細>> ※LIVEセミナ「実験キットで学ぶ 電源・アナログ回路入門」(2024年3月27日,4月 10日,4月24日開催)を受講された方は,特別価格でお求めいただけます.こちらからお申込みください. ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします...
詳細を全部見る元の価格 ¥39,600 - 元の価格 ¥39,600元の価格¥39,600¥39,600 - ¥39,600現在の価格 ¥39,600







学び直し応援!リピート学習割引(最大50%OFF)
-
[VOD/data]Jeston Nanoキットで学ぶ NVIDIA CUDAプログラミング入門【リピート学習割引】
元の価格 ¥9,900 - 元の価格 ¥9,900元の価格¥9,900¥9,900 - ¥9,900現在の価格 ¥9,900ご購入の前に ・本ページは,2024年8月3日に開催された「Jeston Nanoキットで学ぶ NVIDIA CUDAプログラミング入門」セミナ受講者向けの販売ページです.本製品にはキットが付属されません.・以前,本セミナに申し込んでいなかった方は,ご利用いただけません. ・VOD,解説テキス...
詳細を全部見る元の価格 ¥9,900 - 元の価格 ¥9,900元の価格¥9,900¥9,900 - ¥9,900現在の価格 ¥9,900 -
[VOD/data]3D LiDAR×Jetson Superキットで学ぶ高精度リアルタイムSLAM&センサ・フュージョン【リピート学習割引】
元の価格 ¥22,000 - 元の価格 ¥22,000元の価格¥22,000¥22,000 - ¥22,000現在の価格 ¥22,000本製品の詳細>> 販売価格:22,000円(税込・送料無料) 定価:37,950円 42% OFF ●ご購入前に (1)本ページは,2025年5月17日に開催された「3D LiDAR×Jetson Superキットで学ぶ高精度リアルタイムSLAM&センサ・フュージョン」セミナ受講...
詳細を全部見る元の価格 ¥22,000 - 元の価格 ¥22,000元の価格¥22,000¥22,000 - ¥22,000現在の価格 ¥22,000 -

[VOD/data]最適解を高速応答!Linuxで作る電子回路設計AI【リピート学習割引】
元の価格 ¥15,400 - 元の価格 ¥15,400元の価格¥15,400¥15,400 - ¥15,400現在の価格 ¥15,400ご購入の前に ・本ページは,2025年11月22日開催「最適解を高速応答!Linuxで作る電子回路設計AI」セミナ受講者向けの販売ページです.本セミナを受講していなかった方は,ご利用いただけません. ・VOD,解説テキストは1人1ライセンスです・その他の免責事項 仕様 講義動画346分 解説...
詳細を全部見る元の価格 ¥15,400 - 元の価格 ¥15,400元の価格¥15,400¥15,400 - ¥15,400現在の価格 ¥15,400 -
[VOD/KIT/data]M5Stamp Flyキットで学ぶドローン制御プログラミング入門【リピート学習割引】
元の価格 ¥47,300元の価格 ¥47,300 - 元の価格 ¥47,300元の価格 ¥47,300現在の価格 ¥38,500¥38,500 - ¥38,500現在の価格 ¥38,500販売価格:38,500円(税込・送料無料) 定価:49,500円 22% OFF ご購入の前に ・本ページは,2025年8月30日・31日に開催された「ドローン・キット“M5Stamp Fly”で学ぶ マルチコプタ制御入門」セミナ受講者向けの販売ページです.・以前,本セミナに申し込んでいなかっ...
詳細を全部見る元の価格 ¥47,300元の価格 ¥47,300 - 元の価格 ¥47,300元の価格 ¥47,300現在の価格 ¥38,500¥38,500 - ¥38,500現在の価格 ¥38,50019%割引 -

[VOD/KIT/data]実験キットで学ぶ 電源・アナログ回路入門【リピート学習割引】
元の価格 ¥25,300 - 元の価格 ¥25,300元の価格¥25,300¥25,300 - ¥25,300現在の価格 ¥25,300販売価格:25,300円(税込・送料無料) 定価:39,600円 36% OFF ご購入の前に ・本ページは,2024年3月27日,4月10日,4月24日に開催された「実験キットで学ぶ 電源・アナログ回路入門」セミナ受講者向けの販売ページです.・以前,本セミナに申し込んでいなかった方は,ご利用...
詳細を全部見る元の価格 ¥25,300 - 元の価格 ¥25,300元の価格¥25,300¥25,300 - ¥25,300現在の価格 ¥25,300 -
[VOD/data]M5Stamp Flyキットで学ぶドローン制御プログラミング入門【リピート学習割引】
元の価格 ¥22,000元の価格 ¥22,000 - 元の価格 ¥22,000元の価格 ¥22,000現在の価格 ¥11,000¥11,000 - ¥11,000現在の価格 ¥11,000販売価格:11,000円(税込・送料無料) 定価:22,000円 50% OFF ご購入の前に ・本ページは,2025年8月30日・31日に開催された「ドローン・キット“M5Stamp Fly”で学ぶ マルチコプタ制御入門」セミナ受講者向けの販売ページです.・以前,本セミナに申し込んでいなかっ...
詳細を全部見る元の価格 ¥22,000元の価格 ¥22,000 - 元の価格 ¥22,000元の価格 ¥22,000現在の価格 ¥11,000¥11,000 - ¥11,000現在の価格 ¥11,00050%割引 -
[VOD/data]ラズパイとPythonで一緒に! カルマン・フィルタ&センサ・フュージョン入門【リピート学習割引】
元の価格 ¥22,000元の価格 ¥22,000 - 元の価格 ¥22,000元の価格 ¥22,000現在の価格 ¥11,000¥11,000 - ¥11,000現在の価格 ¥11,000ご購入の前に ・本ページは,2025年10月10日に開催された「ラズパイとPythonで一緒に!カルマン・フィルタ&センサ・フュージョン入門」セミナ受講者向けの販売ページです.・以前,本セミナに申し込んでいなかった方は,ご利用いただけません. ・VOD,解説テキスト,ソースコード類は1人1ライ...
詳細を全部見る元の価格 ¥22,000元の価格 ¥22,000 - 元の価格 ¥22,000元の価格 ¥22,000現在の価格 ¥11,000¥11,000 - ¥11,000現在の価格 ¥11,00050%割引 -
[VOD/data]Arm M4/M7/DSP×500MHz!STM32H7ハイスペック計測通信Module開発【リピート学習割引】
元の価格 ¥34,000 - 元の価格 ¥34,000元の価格¥34,000¥34,000 - ¥34,000現在の価格 ¥34,000本製品の詳細>> ※本ページは,2024年10月26日/27日に開催された「Arm M4/M7/DSP×500MHz!STM32H7ハイスペック計測通信Module開発」セミナ受講者向けの販売ページです.本製品にはキットが付属されません. ●ご購入前に (1)講義資料,ソースコード...
詳細を全部見る元の価格 ¥34,000 - 元の価格 ¥34,000元の価格¥34,000¥34,000 - ¥34,000現在の価格 ¥34,000 -
[VOD/data]脱シリアル変換IC!USBマイコン・プログラミング入門【リピート学習割引】
元の価格 ¥22,000元の価格 ¥22,000 - 元の価格 ¥22,000元の価格 ¥22,000現在の価格 ¥11,000¥11,000 - ¥11,000現在の価格 ¥11,000ご購入の前に ・本ページは,2025年10月25日開催「脱シリアル変換IC!USBマイコン・プログラミング入門」セミナ受講者向けの販売ページです.本セミナを受講していなかった方は,ご利用いただけません. ・VOD,解説テキスト,ソースコード類は1人1ライセンスです・その他の免責事項 仕様 講...
詳細を全部見る元の価格 ¥22,000元の価格 ¥22,000 - 元の価格 ¥22,000元の価格 ¥22,000現在の価格 ¥11,000¥11,000 - ¥11,000現在の価格 ¥11,00050%割引 -
[VOD/Full KIT/data]USBマルチ測定器付き!実測とシミュレーションで学ぶアナログ回路設計【リピート学習割引】
元の価格 ¥49,500元の価格 ¥49,500 - 元の価格 ¥49,500元の価格 ¥49,500現在の価格 ¥35,750¥35,750 - ¥35,750現在の価格 ¥35,750●ご購入の前に ・本ページは,2025年10月3日に開催された『実験キットとパソコンで学ぶ Analog Devicesアナログ電子回路教室』セミナ受講者向けの販売ページです.・以前,本セミナに申し込んでいなかった方は,ご利用いただけません. ・ADALM1000とOPアンプ実習キットをお持ち...
詳細を全部見る元の価格 ¥49,500元の価格 ¥49,500 - 元の価格 ¥49,500元の価格 ¥49,500現在の価格 ¥35,750¥35,750 - ¥35,750現在の価格 ¥35,75028%割引







最新技術キャッチアップ
-
[VOD/KIT]実習キットで一緒に作る!オープンソースCPU RISC-V入門
元の価格 ¥127,600 - 元の価格 ¥127,600元の価格¥127,600¥127,600 - ¥127,600現在の価格 ¥127,600本製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳格に守られています.無許可の転載,複製,転用は法律により罰せられます・その...
詳細を全部見る元の価格 ¥127,600 - 元の価格 ¥127,600元の価格¥127,600¥127,600 - ¥127,600現在の価格 ¥127,600 -
[VOD/KIT]一緒に動かそう!Lチカから始めるFPGA開発【基礎編&実践編】
元の価格 ¥69,300 - 元の価格 ¥69,300元の価格¥69,300¥69,300 - ¥69,300現在の価格 ¥69,300本製品の詳細>> ※DE10-Liteをお持ちの方は,こちらがおすすめです. ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳...
詳細を全部見る元の価格 ¥69,300 - 元の価格 ¥69,300元の価格¥69,300¥69,300 - ¥69,300現在の価格 ¥69,300 -
[VOD/KIT]Xilinx製FPGAで始めるHDL回路設計入門
元の価格 ¥52,800 - 元の価格 ¥52,800元の価格¥52,800¥52,800 - ¥52,800現在の価格 ¥52,800本製品の詳細>> ※Basys 3 Artix-7 FPGAボードをお持ちの方は,こちらがおすすめです. ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソース...
詳細を全部見る元の価格 ¥52,800 - 元の価格 ¥52,800元の価格¥52,800¥52,800 - ¥52,800現在の価格 ¥52,800 -
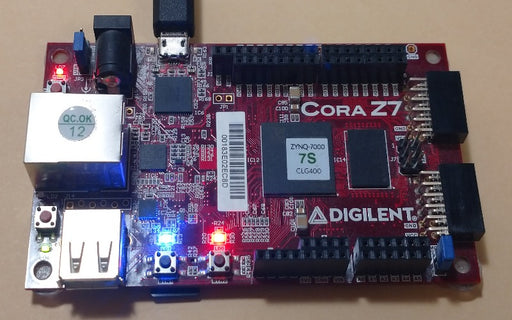
[VOD/KIT]Zynqで初めてのFPGA×Linux I/O搭載カスタムSoC製作
元の価格 ¥71,500 - 元の価格 ¥71,500元の価格¥71,500¥71,500 - ¥71,500現在の価格 ¥71,500本製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・Cora Z7-07S Zynq-7000開発ボードをお持ちの方は,[VOD](キットなし)がおすすめです.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,...
詳細を全部見る元の価格 ¥71,500 - 元の価格 ¥71,500元の価格¥71,500¥71,500 - ¥71,500現在の価格 ¥71,500 -

[VOD/KIT]Tiny FPGA実習!高校生から始めるHDLプログラミング
元の価格 ¥19,800 - 元の価格 ¥19,800元の価格¥19,800¥19,800 - ¥19,800現在の価格 ¥19,8006月25日入荷予定です 本製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコー ドは,著作権法によって厳格に守られています.無許可の転載,複製,転用は...
詳細を全部見る元の価格 ¥19,800 - 元の価格 ¥19,800元の価格¥19,800¥19,800 - ¥19,800現在の価格 ¥19,800 -
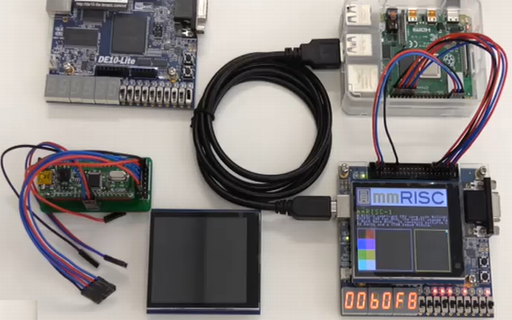
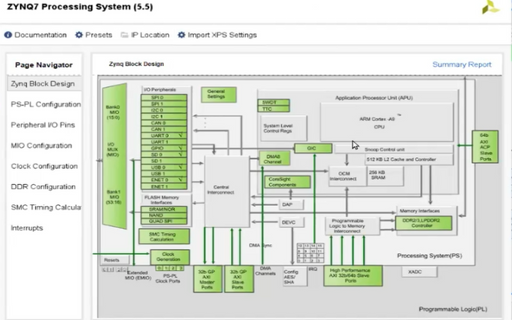
[VOD/KIT]ARM Cortex-A9&FPGA内蔵SoC Zynqで初体験!オリジナル・プロセッサ開発入門
元の価格 ¥139,700 - 元の価格 ¥139,700元の価格¥139,700¥139,700 - ¥139,700現在の価格 ¥139,700本製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・Zynq-7010搭載の開発ボード「ZYBO Z7-10」をお持ちの方または準備可能な方は,[VOD/PMOD]版がおすすめです.・すべての映像...
詳細を全部見る元の価格 ¥139,700 - 元の価格 ¥139,700元の価格¥139,700¥139,700 - ¥139,700現在の価格 ¥139,700 -
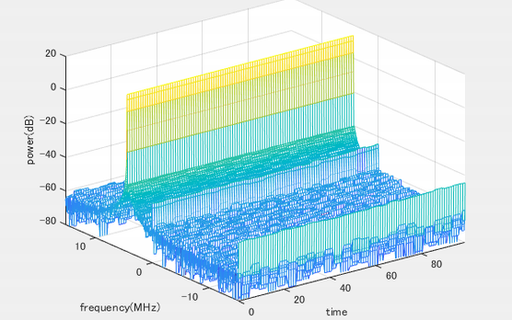
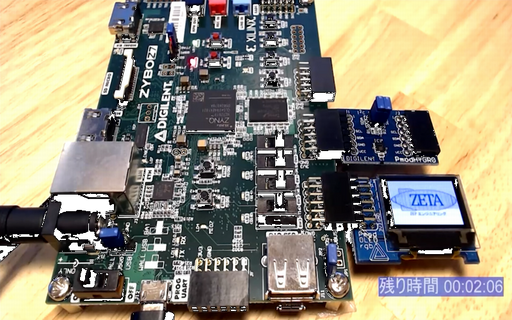
[VOD]MATLAB/Simulink×FPGAで作るUSBスペクトラム・アナライザ
元の価格 ¥5,500 - 元の価格 ¥5,500元の価格¥5,500¥5,500 - ¥5,500現在の価格 ¥5,500本製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳格に守られています.無許可の転載,複製,転用は法律により罰せられます・その...
詳細を全部見る元の価格 ¥5,500 - 元の価格 ¥5,500元の価格¥5,500¥5,500 - ¥5,500現在の価格 ¥5,500 -
[VOD]Zynqで初めてのFPGA×Linux I/O搭載カスタムSoC製作
元の価格 ¥44,000 - 元の価格 ¥44,000元の価格¥44,000¥44,000 - ¥44,000現在の価格 ¥44,000本製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・Cora Z7-07S Zynq-7000開発ボードが必要な方は,[VOD/KIT](キット付き)がおすすめです.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキ...
詳細を全部見る元の価格 ¥44,000 - 元の価格 ¥44,000元の価格¥44,000¥44,000 - ¥44,000現在の価格 ¥44,000 -
[VOD/KIT]一緒に動かそう!Lチカから始めるFPGA開発【基礎編】
元の価格 ¥48,400 - 元の価格 ¥48,400元の価格¥48,400¥48,400 - ¥48,400現在の価格 ¥48,400本製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳格に守られています.無許可の転載,複製,転用は法律により罰せられます・その他...
詳細を全部見る元の価格 ¥48,400 - 元の価格 ¥48,400元の価格¥48,400¥48,400 - ¥48,400現在の価格 ¥48,400 -
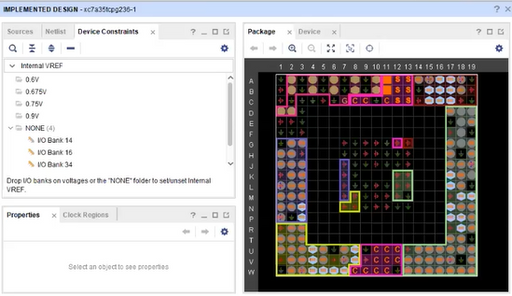
[VOD]Xilinx製FPGAで始めるHDL回路設計入門
元の価格 ¥19,800 - 元の価格 ¥19,800元の価格¥19,800¥19,800 - ¥19,800現在の価格 ¥19,800本製品の詳細>> 本製品には,Basys 3 Artix-7 FPGAボードDE10-Liteが付属されていません.本ボードが必要な場合は,こちらの製品がおすすめです. ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類...
詳細を全部見る元の価格 ¥19,800 - 元の価格 ¥19,800元の価格¥19,800¥19,800 - ¥19,800現在の価格 ¥19,800







特集:次世代技術者のためのAI・IoT・半導体 基礎教材



高周波ノイズ&EMC測定ツール&教材
-
[VOD/Pi5 KIT/data]最適解を高速応答!Linuxで作る電子回路設計AI
元の価格 ¥75,900 - 元の価格 ¥75,900元の価格¥75,900¥75,900 - ¥75,900現在の価格 ¥75,900本製品の詳細>> ご購入の前に ・本コースには,Raspberry Pi 5 / 8GB,実習環境書き込み済SDカードなどを含むすべての部材が付属します.・Raspberry Pi 5(8GB以上)をお持ち,またはご準備可能な場合は,『[VOD/KIT/data]版(キット非付属版...
詳細を全部見る元の価格 ¥75,900 - 元の価格 ¥75,900元の価格¥75,900¥75,900 - ¥75,900現在の価格 ¥75,900 -
[VOD/data] EMCのための電磁界シミュレーション・トレーニングⅠ 【ノイズ対策部品編】
元の価格 ¥26,400 - 元の価格 ¥26,400元の価格¥26,400¥26,400 - ¥26,400現在の価格 ¥26,400本製品の詳細>> ・講師:川口 正 ご購入の前に ・本VOD,解説テキスト,ソースコード類は1人1ライセンスです 仕様 講義動画285分 解説174頁 実習用データ 目次 Part1_フィルタ部品やフェライトビーズ・コンデンサの使い方1.EMCとは2.主なEMC規格と回路設計者...
詳細を全部見る元の価格 ¥26,400 - 元の価格 ¥26,400元の価格¥26,400¥26,400 - ¥26,400現在の価格 ¥26,400 -
[VOD]プリント基板と電子回路のEMC 実践ノウハウ100【第1版】
元の価格 ¥9,900 - 元の価格 ¥9,900元の価格¥9,900¥9,900 - ¥9,900現在の価格 ¥9,900本製品の詳細>> ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・コンテンツ内容について本VOD製品に収録されているコンテンツ(動画および講義テキスト)は,既刊書籍「デシベルから始めるプリント基...
詳細を全部見る元の価格 ¥9,900 - 元の価格 ¥9,900元の価格¥9,900¥9,900 - ¥9,900現在の価格 ¥9,900 -
[VOD/KIT]ポケット・スペアナで手軽に!基板と回路のEMCノイズ対策 10の定石
元の価格 ¥41,800 - 元の価格 ¥41,800元の価格¥41,800¥41,800 - ¥41,800現在の価格 ¥41,800本製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳格に守られています.無許可の転載,複製,転用は法律により罰せられます・...
詳細を全部見る元の価格 ¥41,800 - 元の価格 ¥41,800元の価格¥41,800¥41,800 - ¥41,800現在の価格 ¥41,800 -
[Tool]熱設計スピード・ナビゲータ Thermocalc
元の価格 ¥63,250 - 元の価格 ¥63,250元の価格¥63,250¥63,250 - ¥63,250現在の価格 ¥63,250本製品の詳細>> ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・本製品はソフトウェアライセンス製品です(ご注文後にライセンスを発行いたします)・ライセンスはお客様のPCのMACアドレスに紐づいて発行されます ご注文後に配信されるメールをご確認のうえ、i...
詳細を全部見る元の価格 ¥63,250 - 元の価格 ¥63,250元の価格¥63,250¥63,250 - ¥63,250現在の価格 ¥63,250 -
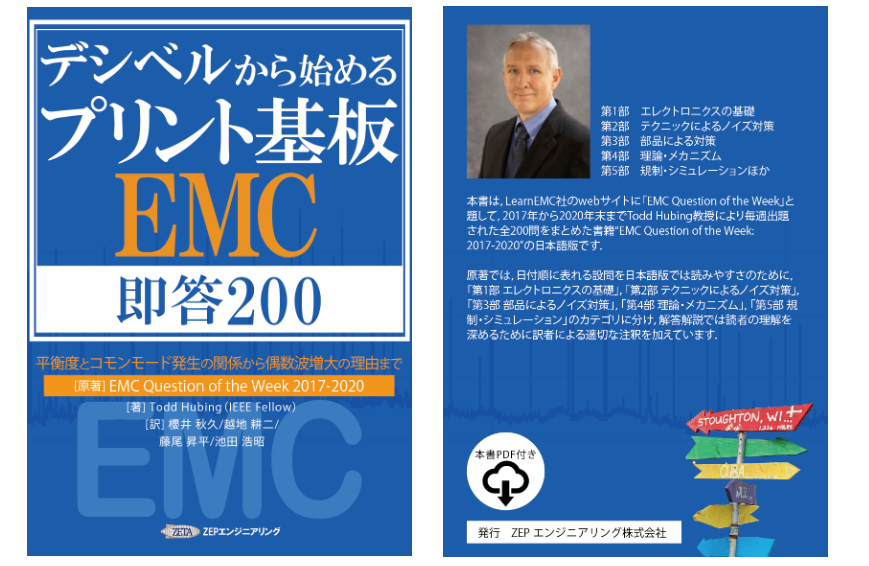
[VOD/Book/data]AI×電磁界シミュレータによる高速&RF回路基板 スピード設計
元の価格 ¥25,300 - 元の価格 ¥25,300元の価格¥25,300¥25,300 - ¥25,300現在の価格 ¥25,300本製品の詳細>> 仕様 書籍『[Book/PDF]デシベルから始めるプリント基板EMC 即答200』,講義322分,解説266頁,実習用データ ご購入の前に ・本VODでは,書籍『[Book/PDF]デシベルから始めるプリント基板EMC 即答200』も利用します.・上記の書籍をお持...
詳細を全部見る元の価格 ¥25,300 - 元の価格 ¥25,300元の価格¥25,300¥25,300 - ¥25,300現在の価格 ¥25,300 -
[Book/PDF]デシベルから始めるプリント基板EMC 即答200
元の価格 ¥9,900 - 元の価格 ¥9,900元の価格¥9,900¥9,900 - ¥9,900現在の価格 ¥9,900本製品の詳細>> 書籍PDF付きセミナ:プリント基板と電子回路のEMC 実践ノウハウ10012月19日:LIVE受講 12月20日~26日:見逃し受講 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・解説テキスト,ソースコード類は1人1ライセンスで...
詳細を全部見る元の価格 ¥9,900 - 元の価格 ¥9,900元の価格¥9,900¥9,900 - ¥9,900現在の価格 ¥9,900 -
[VOD/data]LTspice実践100!電子回路&基板 設計トレーニングⅠ【半導体/部品編】
元の価格 ¥39,600 - 元の価格 ¥39,600元の価格¥39,600¥39,600 - ¥39,600現在の価格 ¥39,600本製品の詳細>> ・講師:青木 正 ご購入の前に ・本VOD,解説テキスト,ソースコード類は1人1ライセンスです 仕様 講義動画562分 解説229頁 実習用データ 目次 Part1 SPICEシミュレーション はじめの一歩 Part2 インダクタの基礎と実装上の落とし穴 P...
詳細を全部見る元の価格 ¥39,600 - 元の価格 ¥39,600元の価格¥39,600¥39,600 - ¥39,600現在の価格 ¥39,600 -
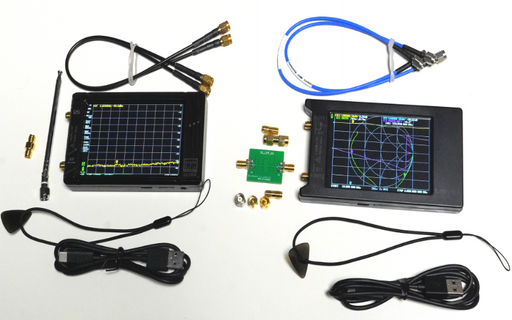
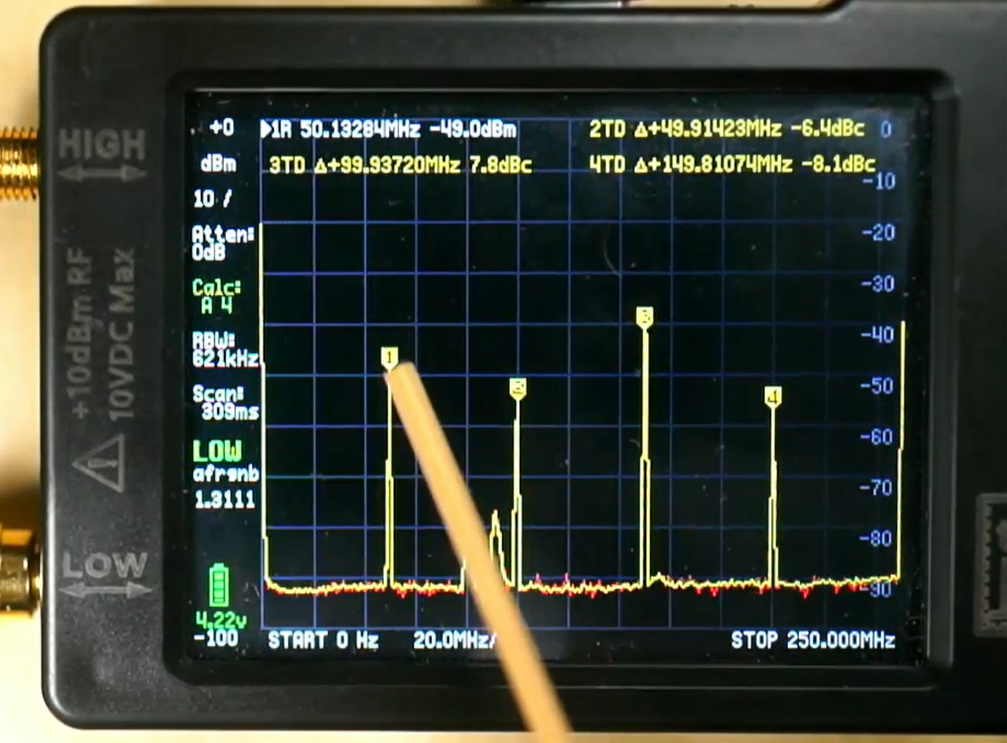
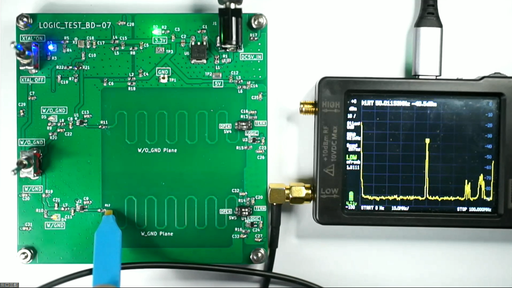
[VOD/KIT]Tinyスペアナ×Tinyネットアナで作る6GHz My実験ベンチ
元の価格 ¥99,000 - 元の価格 ¥99,000元の価格¥99,000¥99,000 - ¥99,000現在の価格 ¥99,000本製品の詳細>> ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・tinySA UltraやLiteVNA64をお持ちの場合は,[VOD] (キットなし) がおすすめです.・VODと実習用基板が...
詳細を全部見る元の価格 ¥99,000 - 元の価格 ¥99,000元の価格¥99,000¥99,000 - ¥99,000現在の価格 ¥99,000 -
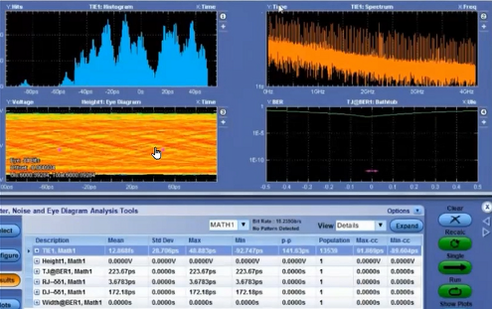
[VOD]Gbps超 高速伝送基板の設計ノウハウ&評価技術
元の価格 ¥22,000 - 元の価格 ¥22,000元の価格¥22,000¥22,000 - ¥22,000現在の価格 ¥22,000本製品の詳細 ご購入の前に 下記をご確認,ご了承のうえ購入のお手続きをお願いいたします.・VOD,解説テキスト,ソースコード類は1人1ライセンスです・すべての映像,画像,文書テキスト,ソースコードは,著作権法によって守られています.無許可の転載,複製,転用は法律により罰せられます・その他の免責...
詳細を全部見る元の価格 ¥22,000 - 元の価格 ¥22,000元の価格¥22,000¥22,000 - ¥22,000現在の価格 ¥22,000